 客服热线:
客服热线:














| 品牌sales19 | 有效期至长期有效 | 最后更新2023-07-03 15:05 |
| 浏览次数101 |
北京汉达森工业机器人关节模组用欧洲进口无框力矩电机高转矩扁平构造
北京汉达森工业机器人关节模组用欧洲进口无框力矩电机高转矩扁平构造
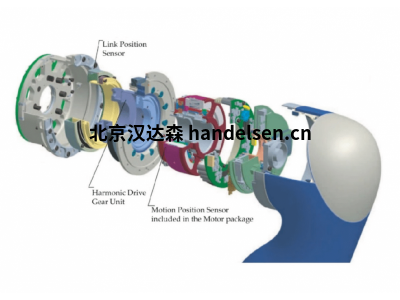
研发设计人员为实现多关节机器人的灵活动作,需要重点解决两大问题:控制和结构。即为了提高生产的灵活性,要求机器人重量轻,尺寸集成,也同样要求电机能以紧凑的体积实现高性能运动及控制精度。
北京汉达森工业机器人关节模组无框电机采用内转子技术的BLDC电机套件,包括转子和定子(不含轴承和电机轴),在组装时才会将这些组件相互连接。扁平构造、转矩高,而且有足够的空间用于导线连接,可以轻松方便地整合应用中。

常见机器人关节分类:
研发设计人员为实现多关节机器人的灵活动作,需要重点解决两大问题:控制和结构。即为了提高生产的灵活性,要求机器人重量轻,尺寸集成,也同样要求电机能以紧凑的体积实现高性能运动及控制精度。
北京汉达森工业机器人关节模组无框电机采用内转子技术的BLDC电机套件,包括转子和定子(不含轴承和电机轴),在组装时才会将这些组件相互连接。扁平构造、转矩高,而且有足够的空间用于导线连接,可以轻松方便地整合应用中。
常见机器人关节分类:
机器人关节模块有多种类型,每种模块都有特定的用途并提供不同的运动自由度。 一些常见的机器人关节类型包括:
旋转关节:这种类型的关节允许围绕单个轴进行旋转运动,就像铰链的运动一样。 它通常用于机器人手臂和腿。
棱柱关节:棱柱关节可沿单个轴进行线性运动,类似于滑动抽屉的运动。
球形接头:球形接头允许在多个轴上进行旋转运动,比旋转接头提供更多的运动自由度。
平面关节:平面关节将运动限制在二维平面内,通常用于具有平面、类似桌面运动的机器人系统。
万向节:万向节结合了两个相互垂直的旋转关节,允许两个旋转自由度。
连续关节:这种类型的关节允许连续旋转,没有任何限制。
这些关节模块通常配备执行器和传感器,使机器人的控制系统能够准确地命令关节运动。 关节模块与其他组件一起形成机器人的运动链,决定其整体运动能力。
无框电机具体参数:
直径 70mm
直径 70mm
额定电压 48 V
空载转速 2500 rpm
空载电流 140 mA
额定转速 2080 rpm
额定转矩 1190 mNm
额定电流 6 A
堵转转矩 7930 mNm
相间电阻 0.46 Ω
相间电感 0.7 mH
转矩常数 184 mNm/A
转速常数 52 rpm/V
转速/转矩斜率 0.132 rpm/mNm
机械时间常数 0.38 ms
转子惯量 275 gcm²
北京汉达森工业机器人关节模组用欧洲进口无框力矩电机高转矩扁平构造
转动惯量的概念
一个刚体对于某转轴的转动惯量决定了对于这物体绕着这转轴进行某种角加速度运动所需要施加的力矩。
转动惯量也叫惯性矩,构件中各质点或质量单元的质量与其到给定轴线的距离平方乘积的总和。
转动惯量大小,要看整个系统的要求,比如矿山机械中的颚式破碎机,要求系统惯量要大,那电机的转动惯量大一点好;比如车载卫星接收站的随动伺服系统,需要快速启动、快速制动,对系统的转动惯量要求小,那电机的转动惯量就要小。
| 田文杰 QQ:2850590585 手机:18515152330 电话:010-64714988-185 传真:010-84786709-667 邮件:sales19@handelsen.cn |
 |
 |










